Design and Fabrication of Flying Device with Flapping and Morphing Wings
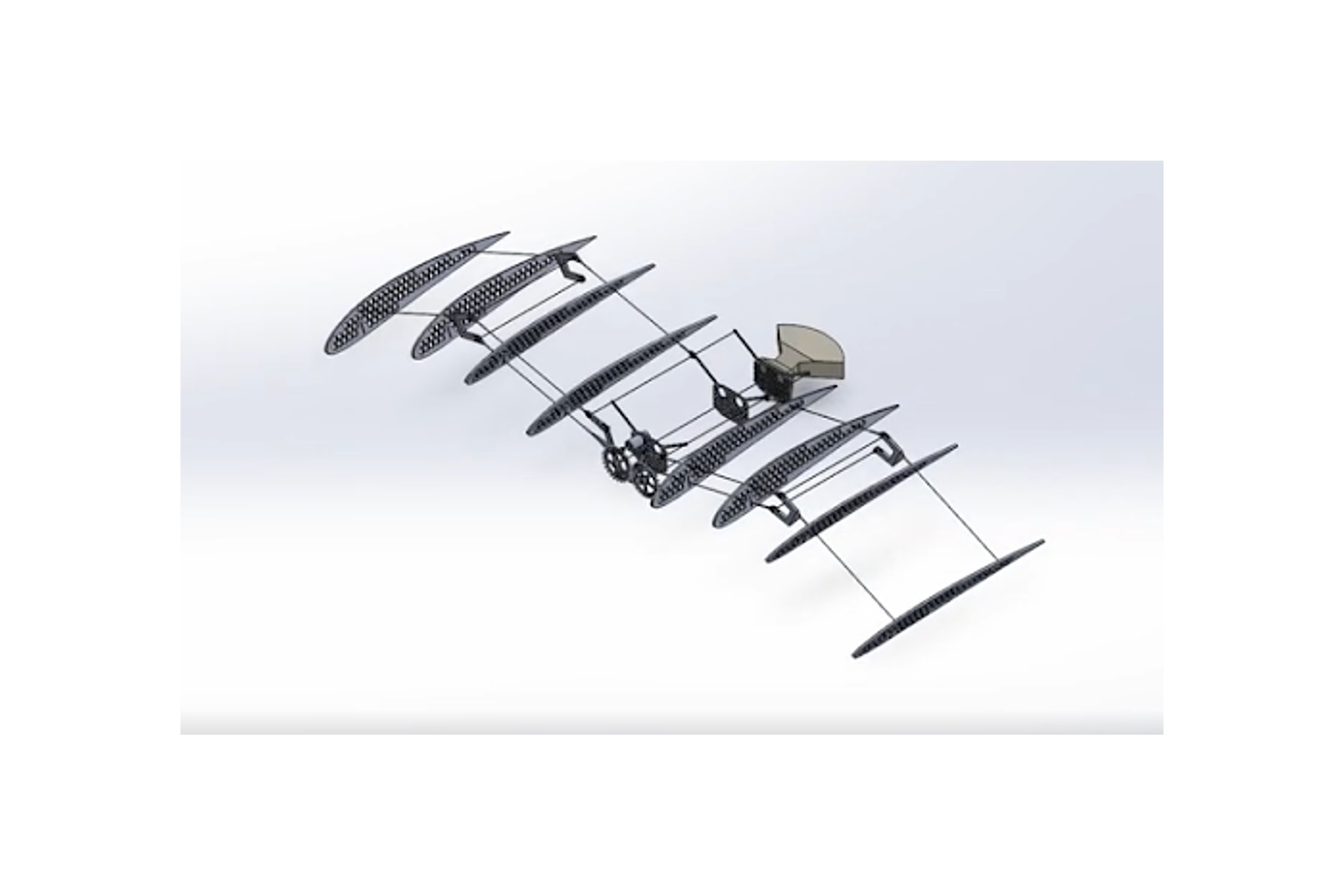
This senior design project concentrates on the design and development of a mechanical bird capable of flight through flapping and morphing wings. Unlike conventional unmanned aerial vehicles such as fixed-wing drones and quadcopters, which rely on exposed propellers and rotors, a bird-inspired system offers the potential for quieter operation and improved safety. As the use of small unmanned aerial vehicles continues to expand in reconnaissance, delivery, and recreational applications, bird-like drones present an increasingly attractive concept that can reduce detectability, noise, and minimize the risk of injury associated with the rotating blades. In addition, mechanical birds could support airport wildlife management by deterring birds near runways, where bird strikes commonly occur at low altitudes and can lead to engine failure and flight delays. By imitating natural bird flight, flapping-wing drones offer promising applications in low-noise surveillance, wildlife monitoring, and airport bird control. The primary motivation of this project is to investigate a safer alternative to traditional drone configurations. Specifically, if a flapping-wing aerial vehicle, or mechanical bird, could operate more discreetly, conduct low-noise reconnaissance, and improve safety conditions in close-range environments. By eliminating traditional propellers with flapping wings, the mechanical bird can improve operational safety for other users and wildlife, as well as possible improved environmental integration. The design objective is for the wings of the mechanical bird to generate sufficient lift to sustain flight after initial thrust is provided without the use of additional propellers To develop a mechanical system capable of generating sufficient lift and thrust through controlled wing motion, aerodynamic analysis and mechanical design are the engineering approaches used. The emphasis of this design is the flapping mechanism with morphing wing behavior that can replicate the efficiency of natural bird flight. To successfully design the mechanical bird, the design process was divided into key engineering tasks: design of a lightweight structural frame, development of a mechanical system that can convert motor input into coordinated wing motion, and selection of various materials that can provide sufficient durability and strength while also being low mass. The different engineering tasks of this project had several constraints, such as structural reliability, energy efficiency, and mechanical simplicity. To drive the mechanical bird's flapping motion, the design consisted of articulated wings, transmission mechanisms, and a compact and durable frame. The articulated wings are designed to morph under controlled conditions while also generating sufficient lift and improving aerodynamic performance. This design is intended to sustain flight after initial launch through the stable and repeatable motions of the wings. Testing and experimental observations are being utilized to assess how effectively the mechanical bird meets design objectives and to identify areas of improvement. Through ongoing testing, the mechanical bird has demonstrated the feasibility of applying bird-inspired flight concepts to unmanned mechanical systems. This design project will aid the ongoing development of flight, such as control integration, aerodynamic efficiency and stability. This mechanism will also have a broader impact, enabling a safer, more adaptable, and quieter aerial system than a traditional propeller drone would be less suitable for. By designing a mechanical system based on natural bird flight, this project can contribute to future innovative vehicle designs for societal and engineering benefits.